

 如果结果不匹配,请
如果结果不匹配,请 

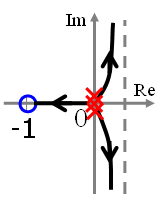
 更多“某单位反馈的控制系统根轨迹如图所示分析根轨迹,可知该系统()…”相关的问题
更多“某单位反馈的控制系统根轨迹如图所示分析根轨迹,可知该系统()…”相关的问题
已知单 位反馈控制系统的闭环传递函数为
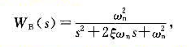
试画出以ωo为常数、ξ为变数时,系统特征方程式的根在s平面上的分布轨迹。
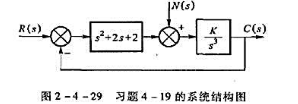
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
A.[-10]
B.[-9.-3]
C.[0.+∞]
D.[-3.-1]
E.[-∞,-9]

已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。
A.G(s)H(s)的极点
B.G(s)H(s)的零点
C.1+G(s)H(s)的极点
D.1+G(s)H(s)的零点






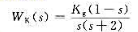
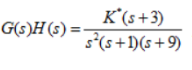 ,其内环回路根轨迹在实轴上的根轨迹是()。
,其内环回路根轨迹在实轴上的根轨迹是()。








